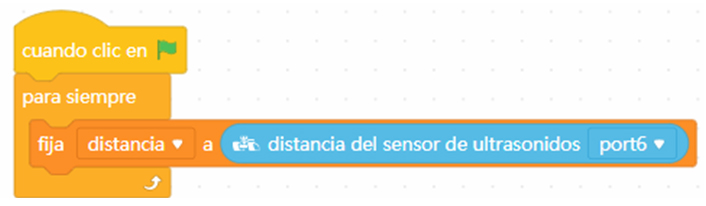
Este módulo calcula la distancia desde el robot Ranger hasta el objeto más cercano. Se puede conectar a los puertos RJ desde el 6 al 10 (amarillos)
Para probar la lectura que realiza el sensor utilizamos el siguiente código:
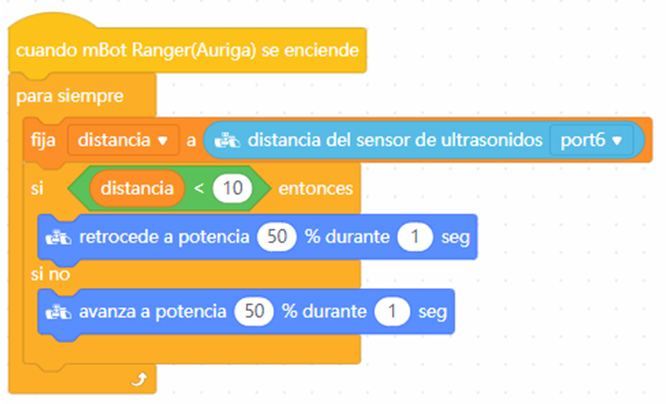
DETECTOR DE OBSTÁCULOS
OBJETIVO: Programamos al robot Ranger para que retroceda cuando detecte un objeto a menos de 10 cms de distancia y avance en caso de no detectar un objeto cercano.